今回から新シリーズです!
今年の6月に掲載した記事からずっとESCを自作する試みは進めていました.
その途中で車高ゲージを作ったり,レシオチェッカーを作ったり寄り道はしていましたがこれもスキルアップに役立ってました
ESC自作に向けて回路図の書き方と基板CADを習得しつつありESCの形になってきたので新シリーズ化してみっました
開発のドナーになってくれる車両はこちら

TRGHPよりスーパーラジコン秋葉原の某店長氏からお借りしたTRG製のFP2となります
i塚さんご協力大変ありがとうございます!
FP2に至った経緯としては
・シャシー構成がシンプルで床面積が広い → いろんな基板を載せたりするのに好都合
・駆動アクスルがリジット → タイヤを外回しして動作確認するときにデフがないと楽
といったいろんな都合で選択しました
さて今までの開発環境をそのままFP2に移植してみたのがこちら

かなりごちゃついてます これで走行は難しそう…
大電流を流す基板と制御用の基板が分かれているので通信用のハーネスが盛り上がってます
この状態でモーターが回転することは確認済みなので電気的な接続はOK

ZEN製 Z0022 レジェンドCカーボディ MCLタイプ
このボディであればキャビン部分が大きくて基板自体は干渉せずに搭載できました
ただハーネスは収まらないのでやはり通線用の基板を自作する必要がありそう
自作ESCを作る上で基板作成スキルは避けて通れないのでこの際覚えることにしました
使用したCADはフリーソフトであるKiCADです.

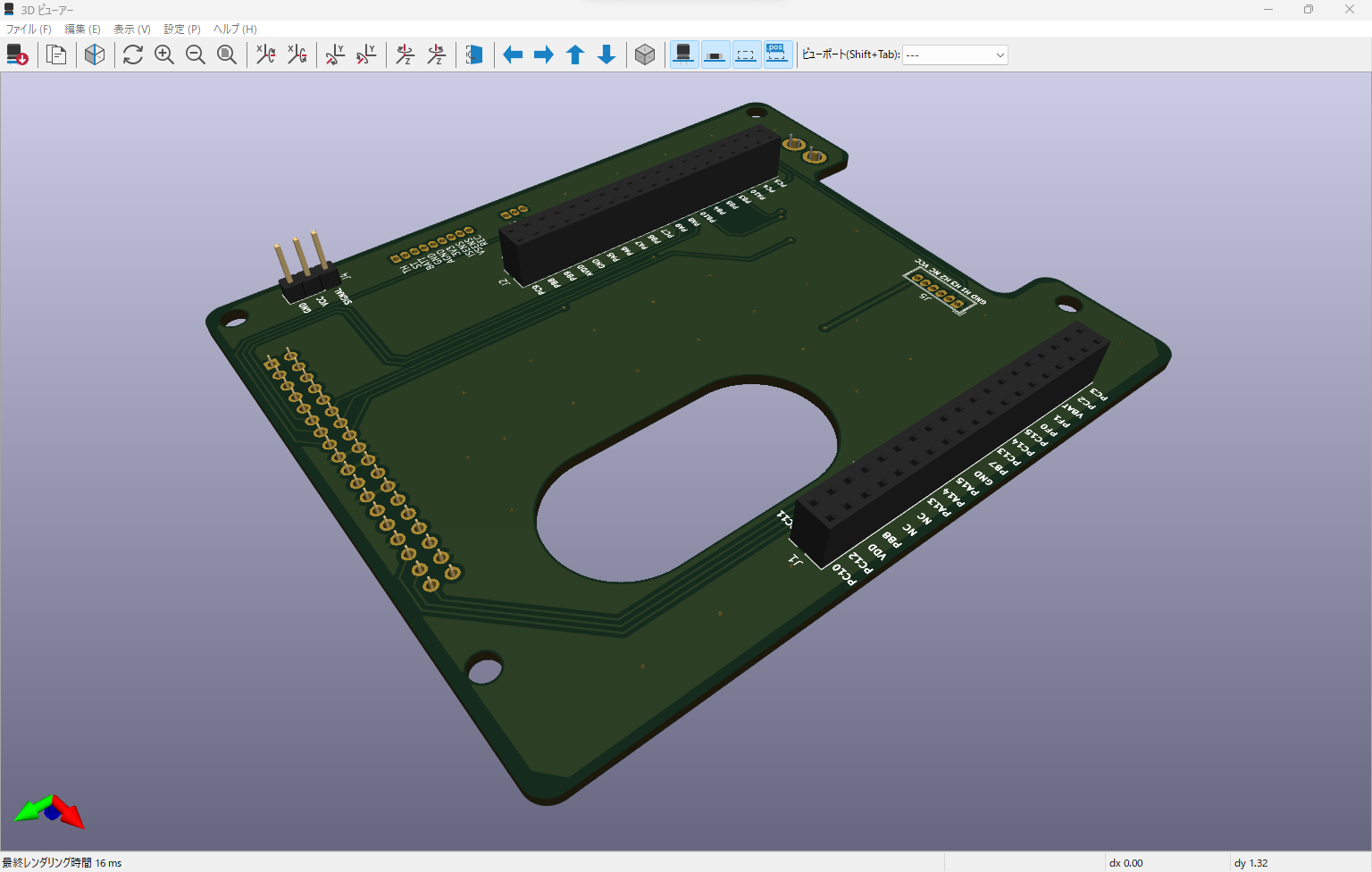
今回の回路図
ひとまず必要な接続は記載しているのでできることは
- 制御基板であるNucleo-G474RE基板とパワー基板のDRV8302を接続するパターン
- モーターのホールセンサー、レシーバーからの信号をNucleoボードに入力するパターン
- 将来の拡張を見据えてSmartLoggerとの拡張ポートの予約設計
この時点でIOピンに対してネットを入力するのでここを間違えなければ電気的な接続は間違えることがない
よってユニバーサル基板等で実装するよりミスを大幅に削減できます

ネットリストを元にパターンを作成
表裏の2層基板に対して電源線は1mm,信号線は0.75mmとしました今回の基板には大電流が流れる部分がないのと,高周波数な信号線や差動信号もないのでかなり簡単な基板です.
GNDのベタパターンを追加してひとまず基板検討は完了
設計をミスしてしまって2回の手配しましたがそれでも5枚頼んで$44程度でした
ミスった模様はこんな感じ

コンデンサと切り欠き位置を間違って思いっきり干渉してます…
ちなみにこの段階ではSmartLoggerの拡張設計もしてなかったので再手配のついでに実施
再手配したものはバッチリ レジストの色も緑にしてみた
やっぱり緑のほうがパターン見やすいし一般的に使われている理由がよくわかりますね

車載状態はこんな感じ
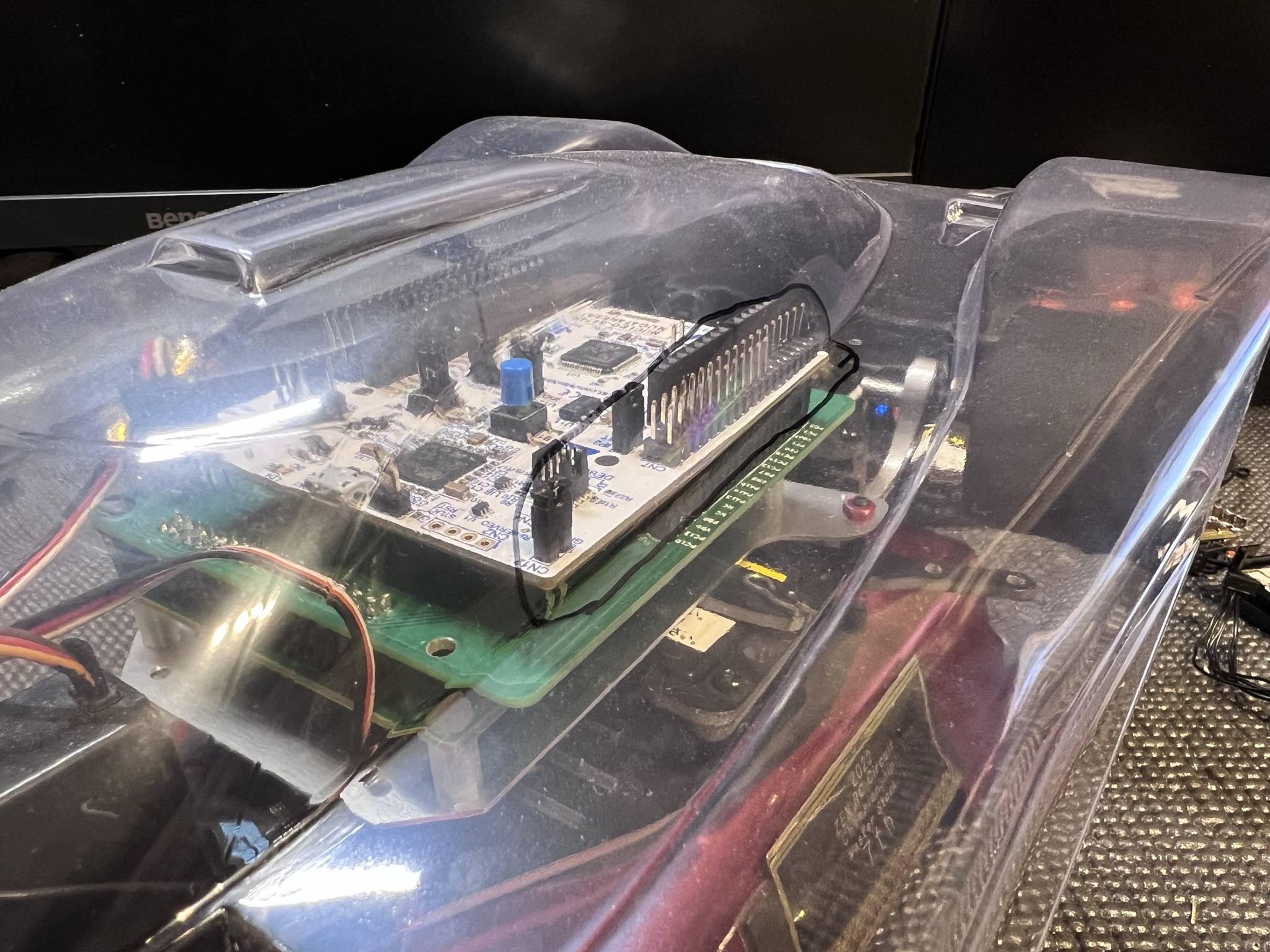
Nucleo基板をオフセットさせたのでボディと干渉するのでカットが必要そう
ハードウェア的にはひとまずこれで完了で
これで断線の心配なく安心して実走テストに進めます
ソフトウェア
今回はmtabeさんからのご紹介で新たに名古屋のお友達ができて
その方に多大なるご協力をいただいてモーターのベクトル制御コードを作成しています
現状では自分で書いたコードはプロポの信号を読み取ってモーターに回転指令を与えるところだけです

このあたりでレシーバーの信号を読み取ってる
僅か数十行のコードですが紆余曲折あり、たどり着くまでに数か月勉強が必要でした…
プロポメーカーが変わったときの補正や、デッドバンドの実装はもうひと工夫必要ですが根幹の部分を学べたのであとは小変更でイケそう現在のモーター制御コードはPLL制御という制御も実装しており
モーターのケースに装着されているホール素子の位置ズレを補正する機能も実装しています
いわゆる”あたり”モーターが関係ないものになるのである意味イコールコンディションにもなるのかなと

モーターチェッカーのTiming測定のこの画面の数値のズレのことです
弱め界磁制御や二相変調制御によるモーター動作域の拡大
回生ブレーキによるバッテリーエネルギーマネジメント
を実装していこうとしています
特にブレーキの難しいDD車なので制御を頑張ることでドラビリを確保できるブレーキを見出すことができればいいなと思います