今年も真冬の恒例行事にもなっているしらかば2in1主催のスノーラリーに行ってきました!
去年の記事では3Dプリンター製のガルアームサスアームを採用してレースに備えていましたがコロナの影響でレースは開催されず
ただスカイホビーで走らせた結果としては従来の真っすぐなサスアームに対してギャップ走破性はかなり向上していました
でもやっぱりギャップを受け止めきれずストレートではピョコピョコ跳ねてしまいます
これはロマン重視のラリーカーには実車感があんまり出てない動きだし
スピードとしてもストレートで跳ねた瞬間はタイヤが地面から離れてしまうので加速の効率は悪くなってしまいます.
普段通っているZENのF1カーにはバッテリーを可動体としたマスダンパーを装着されたF1が良く走っているのでこれをインスパイアしてラリーカーにもマスダンパー適用を検討してみました
詳細については”すだぴょん”氏に動画にしてもらいました!
23年3月1日時点で再生回数が1万回を超える動画になりすだぴょん氏にも褒められてしまいましたw構造としては動画にある通りなんですがアッパーデッキ上に平行リンクを組んで,スプリングで支える構造としました
ただスプリングを付けるだけではマウントしづらいのでダンパーケースを使ってマウントする構造を取りました


バッテリーは板厚0.8mmのカーボンプレートで作っています
手間がかかることは目に見えているので前もって可動範囲やバネレートは事前に検討してから製作に移りました
先ずはマスダンパーとはどのように考えるか、ですが
wikipediaには動吸振器の項で記事になっています
いろんな数式が書いていますが根底の理論としては
”車体を持ち上げる(落下する)力と反対方向の力を掛けて振動を防ぐ”
というものとなります.
このことを念頭に置いておけば数式が示す意味も理解しやすくなります

マスダンパーオモリ変位量:Xa[mm]
車体変位量:Xm[mm]
車体加振力:f(t)[N]
マスダンパーバネレート:ka[N/mm]
車体バネレート:km[N/mm]
車体ダンピング:ζm[N・m/s]
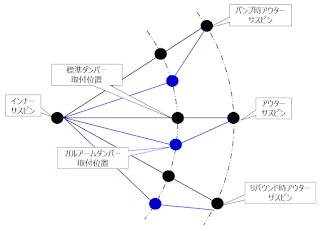
上記のようにラジコンカーを簡単な形状にモデリングします難しい言葉で書くと2自由度強制振動系となります
先ほど青字で書いたことを上図でいうとf(t)と釣り合う力をmaを用いて出すという考えです
(t)とか出てくると何のこと!?となってしまいますが時間の関数なのでエクセルで0sec,0.001sec,0.002secといったようにオートフィルしていけば計算できるので身構えなくても大丈夫です

今回走らせる想定の路面をモデル化しました
これを計算すると18Hzのsin波となります.1秒進む間に18山のギャップを踏むイメージですね.これは過去の動画を見ながらギャップの数を数えたら多くともこんな感じでした20mmというのは正直エイヤと出しました.タイヤの1/3の径より大きいと超えられないと聞いたこともあるし,今のラリーカーの車高は20mm程度なのでひとまずこの値で置いています
さてwikiの記事によるとマスダンパーの固有振動数(ωa)と路面の周波数(Ω)が同じときに逆位相でマスダンパーが動くと記載されています
マスダンパーの固有振動数は


この数式で示せる
電卓でもできますね.maは1Sサイズリポバッテリーの150gでその時,ωa=Ωが成り立つkaは1.8N/mmとなります.普段使うスプリングの柔らかいもので代用できそうですkaを求めたらxa(車体の変位)がゼロとなる変数を下記式を使って求めてみます

前述のようにtの関数となるのでエクセルのオートフィルを用いて計算します.
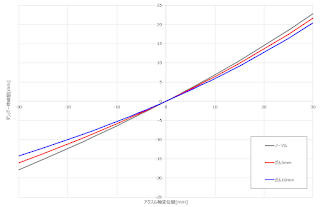
計算結果は下記グラフのようになりました

マスダンパーのストロークと支えるバネレートを求めました
今回の1Sサイズバッテリーは150gなので必要なストローク量は約3mm,スプリングレートは1.8N/mmとなります.グラフにある通りマスが小さいと長いストロークで柔らかいスプリング
マスが重いと短いストロークで固いスプリングになるので
じゃあ20gぐらいのオモリを20mmぐらい動かした方が簡易な構造でいいじゃん!となりますが新たな指標として質量比を考慮する必要があります
マスダンパー重量から車重で割った質量比μの関係は下記図になります
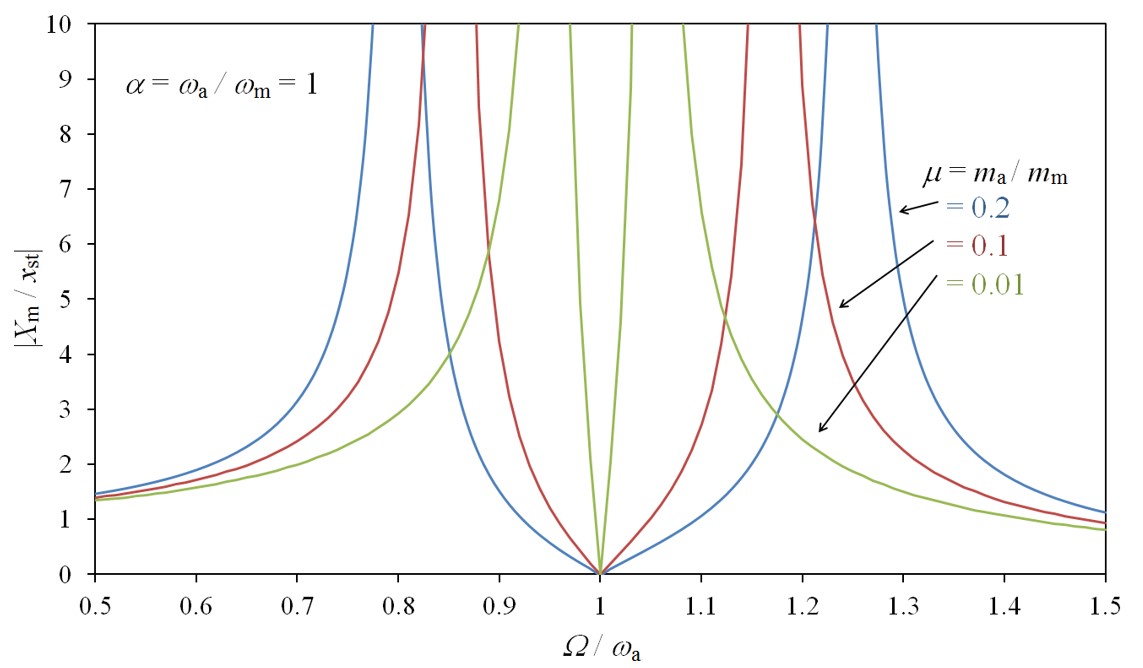
wikipediaより
今回はバッテリー150gに対して車重は1350g (総重量は1500g)なので質量比μは0.11上図でいうと赤プロットに近いところになります
X軸に注目するとΩ/ωa=1の時振動を完全に消失でき同調状態になります.ただΩ/ωa=1の両隣に進むと振幅であるY軸が大きくなってしまう
そして質量比が大きいほど振幅の上昇度合いが少ないので,大きい値をとる方がロバスト性が高いと言えます
Ωは正直写真からカウントした数になるので毎度同条件になるとは限らないので,ある程度の範囲でマスダンパーが機能するようにしておくのが重要です

参考までに減衰を付与するとさらに安定度が高くなる
今回のスノーラリーの期間中に減衰まで弄る時間がありませんでしたが,腰を据えてやるならこのアプローチもありですね実際に走行させてみた
スノーラリーではインナーボディを付けるので車載映像は取れずオフロードコースではアクションカメラが汚れそうだったので近所のスピードバンプで試してみました
動作は問題なくしてますね.効果は…まぁ…あるんでしょう.アクションカメラの手振れ補正が半端ないのでマスダンパー有り無しでも差がわからなさそう
さてスノーラリーの結果としてはミニレースが行われ
すだ氏の動画にもありますがレース2で優勝しました!

頑張って作ったラジコンがよく走ると楽しいですね
さてこのマスダンパー検証
本来の目的はオンロードツーリングカーへの応用が主目的でした
ラリーみたいなギャップが激しいカテゴリーで効果検証ができればよりギャップの低いオンロードだと効果は見込めるだろうと
全日本のあるグリーンパークではギャップ対策に苦労した面もあるのでこの辺りも応用できないかと目論んでいました

ギャップ高さ5mmでのシミュレーション結果
質量比をどのくらい置くか,減衰はどうするか?
そもそもオンロードの路面のギャップってどの程度なのか?すべて妄想ですが40gぐらい積んで0.5N/mmのスプリングで支え,2mm動くギミックがあればとりあえず効果検証は出来そう