来年の全日本のモータ規定がJMRCA独自規格だったものがROAR規定になるようです.
レギュレーションの決まる経緯やモータの認定は正直そんなに興味がないのでここには書きません.
ただ来年度の規定はこうします!という公式なアナウンスはなるべく早く欲しいですね.準備期間的にも
JM→ROAR化で同じターン数の場合速くなると聞いた上に,実際にROARモータをテストしている場面にも出くわしていて速いなぁと感じたので実際に自分がモータを購入する前にシミュレーションでいろいろと準備しようと思います.
ワークスやサポートドライバーの方々のセットアップシートが出揃わない中で、モータを買って燃やしましたとか減磁させました等は嫌ですからね
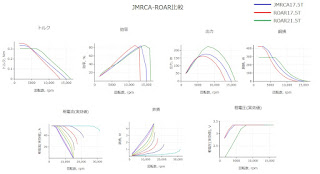
今回は仕事で使って便利だったツールでJMAG-Expressを使用して出力や進角特性を解析してみます.

各部の寸法や巻線方法、通電方法を入力するだけで回転数とトルクの関係や効率、熱解析まで実施してくれます.しかもこのツールは会員登録だけで使用することができるのでかなり便利なツール
JMAGユーザーや有料会員になるとより詳細な解析を実施できますが,ラジコンモータの設計者ではなくあくまでユーザーなので無料の機能だけでも十分な評価項目になります.
さて情報収集して得られたJMとROARの大きな変化点が下の表になります.

これに加えてステータ外径が少し小さくなり軽くなっているみたいです.
積厚変化もあるみたいですがROAR規定を眺めても積厚の項目が書いてなかったのでとりあえず同じ寸法と仮定しています.
これだけの情報では解析できないので手持ちのモータを分解してみました.

ドナーは約半年ほぼ毎週酷使したHWの17.5TJMRCAです.一度ファンが止まってる状態で5分間走行もしてしまいかなり高温になってしまった履歴があります.巻線も真っ黒ですね、、
最近2分過ぎから極端にパワーが落ちてくるのですが、ロータを交換しても改善されないのでステータに原因がありそうです.

モータ缶からステータのみ取り出し,ABC相のバスバーCOMPと銅のリングをニッパーを使って切断.
この段階で左側の銅のリングは中点であることが判明.このモータはスター結線ということがわかりこれもJMAGに入力します.

巻線を解して外していきます.今まで機械巻きだと思っていましたが,ティース先端の形状から手巻きっぽいですね.生産数から設備投資をするよりも人が作ったほうが安いのもありますが,ステータコアの形状からかなり性能に振った思想なのでそもそもの構想が手巻き前提だと思いました.
巻線の占積率もかなり高いです.絶縁はステータコアの緑の粉体塗料と相間絶縁の絶縁紙が入っていました.

中点には2本の巻線が並列に接続されており2パラの巻線パターンということがわかります.
※上記の数項目は分解しなくてもよく観察すれば分かる項目なので決定的なノウハウではないと考えております.これはノウハウだな、、ってところは記載していません

完全に分解してバスバーCOMPの裏側の巻線の絶縁被膜が炭化している部分を発見
うまくファンの風が当たらない部分で、高温になり絶縁被膜にダメージが及んだんでしょう
常温近くでは絶縁できているので機能するが,高温になると絶縁性能が極端に低下しこの部分だけ地絡気味になりパワーダウンしていたんでしょう